Mathworks RoadRunner R2025a — это программное обеспечение для проектирования и моделирования дорожных сценариев, предназначенное для разработки систем автономного вождения и тестирования ADAS. С помощью инструментов программы создаются детализированные 3D-сцены, включая дороги, перекрёстки, транспортные потоки и городскую инфраструктуру. Решение активно используется в автомобильной промышленности для валидации алгоритмов сенсоров и систем управления.
Описание программы
Mathworks RoadRunner R2025a представляет собой специализированный редактор для моделирования дорожной инфраструктуры и сценариев движения транспортных средств. Программа ориентирована на инженеров и разработчиков, занимающихся созданием автономных транспортных систем. С её помощью можно строить реалистичные полигоны, перекрёстки, развязки и городские ландшафты с точной геометрией и разметкой. RoadRunner поддерживает работу с картографическими данными, включая OpenDRIVE и OpenSCENARIO, что обеспечивает высокую совместимость с другими инструментами симуляции.
- Поддержка форматов OpenDRIVE, OpenSCENARIO и FBX для экспорта сцен
- Инструменты для создания сложных дорожных развязок и светофорных систем
- Интеграция с MATLAB и Simulink для симуляции динамики транспортных средств
- Библиотека готовых 3D-объектов: автомобили, пешеходы, дорожные знаки, освещение
- Возможность ручной прорисовки дорог с настройкой уклонов, кривизны и количества полос
Программа позволяет визуализировать сложные траектории движения и моделировать поведение автономных систем в реалистичной среде.
Работа с Mathworks RoadRunner
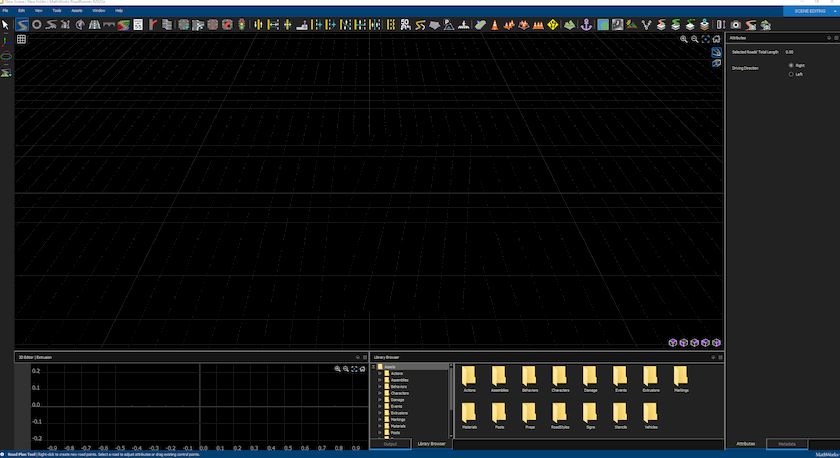
После установки Mathworks RoadRunner пользователь получает доступ к графическому интерфейсу, ориентированному на проектирование дорог и дорожной инфраструктуры. Процесс создания сцены начинается с построения осевой линии дороги, к которой затем добавляются полосы, обочины, бордюры и разметка. Можно задавать параметры уклонов, виражей, пересечений и прилегающей застройки. В сцену легко импортируются 3D-модели из внешних источников. Для настройки поведения транспортных средств и тестирования сценариев используется интеграция с Simulink, где моделируются реакции систем на внешние условия. Готовые проекты экспортируются в форматы, пригодные для использования в симуляторах виртуальных испытаний.
Сильные и слабые стороны
Преимущества Mathworks RoadRunner заключаются в высокой точности геометрического моделирования и глубокой интеграции с экосистемой MATLAB. Программа упрощает процесс разработки тестовых сценариев для автономного вождения, позволяя быстро генерировать репрезентативные дорожные ситуации. Поддержка стандартов OpenDRIVE позволяет обмениваться данными с другими инструментами, используемыми в автомобильной промышленности. Удобный интерфейс и визуальные подсказки помогают эффективно работать даже с большими проектами.
Достоинства:
- Высокая точность проектирования дорог и инфраструктуры
- Эффективная интеграция с MATLAB и Simulink
- Расширенная библиотека объектов и поддержка внешних моделей
Недостатки:
- Требовательность к ресурсам системы при работе с большими сценами
Версия R2025a включает улучшенные инструменты редактирования, оптимизацию производительности и новые элементы дорожной инфраструктуры. Программа поддерживает русский язык интерфейса и поставляется в виде RePack с интегрированным лицензионным ключом. Установка возможна на операционные системы Windows 10 и 11 разрядностью 64 bit. Несмотря на специализированную направленность, RoadRunner демонстрирует высокую гибкость и подходит как для научных исследований, так и для промышленной разработки. Поддержка кряка позволяет использовать программу без активации. Скачать Mathworks RoadRunner R2025a можно на данной странице.
Скриншоты
| Автор: | MathWorks |
| Цена: | RePack (с интегрированным лицензионным ключом) + Crack |
| Локализация: | Русский |
| Операционная система: | Microsoft Windows 7, 8.1, 10, 11 x86-x64 (32/64 Bit) Home, Pro |